
In recent years, the field of soft robotics has seen enduring interest due to the potential applications of fabric-based soft pneumatic actuators (FSPAs). These innovative devices are engineered to replicate natural movement through deformation upon pressure application. Unlike traditional mechanical robotics, which can be rigid and cumbersome, FSPAs are designed to be flexible and adaptable. This flexibility allows FSPAs to interact more safely with humans and delicate objects, opening the door for applications in wearable technology, adaptive environments, robotic manipulations, and assistive devices. Their unique attributes — low cost, adaptability, and safety — make them a formidable component in modern robotics. However, the design and manufacturing of these actuators hold inherent challenges that have prompted researchers to delve deeper into optimization techniques and material science.
Turing Patterns: Nature’s Blueprint for Design
A recent study published in *Scientific Reports* has unveiled a novel approach to FSPA development by incorporating Turing patterns. The study leverages Alan Turing’s morphogenesis theory, originally proposed in 1952, which explains how intricate patterns arise from simple substances through reaction-diffusion processes. Turing patterns can create various designs observed in nature, such as the stripes of a zebra or the spirals of a shell. This study illustrates how Turing patterns can be strategically employed to design surface textures that can optimize the functionality of these pneumatic actuators. By utilizing gradient-based orientation optimization, the researchers have set a foundation for constructing FSPAs with enhanced movement control and agility.
The Research Insights
The research team, which includes experts from Toyota Central R&D Labs., Inc. and Toyota Motor Engineering & Manufacturing North America, highlighted their motivation rooted in the pressing need for effective pneumatic actuators in soft robotics. According to Dr. Masato Tanaka, one of the principal investigators, the objective was to develop cost-efficient FSPAs that are capable of controlled deformation using rudimentary mechanisms rather than specialized materials. This focus on simplification circumvents many cumbersome logistical hurdles faced when conventional methods of actuator design are employed.
The challenge in crafting effective FSPAs often lies in the trial-and-error nature of material selection. Traditionally, isotropic materials are preferred due to their uniformity in physical response to inflation and pressure. However, achieving desired deformation patterns demands meticulous experimentation, making the design process laborious and time-consuming. The researchers sought to ameliorate these limitations by automating the design process, enabling the creation of complex and controlled movements in soft robotic systems.
The innovative design methodology introduced by the research team involved using anisotropic materials, allowing for more controlled deformation based on material orientation. The nonlinear finite element method was employed to optimize the orientation of fabric fibers on the actuator’s surface. This meticulous orientation allows for the material to respond specifically to mechanistic inputs, effectively creating custom actuation profiles designed for individual applications.
Following the optimization, the researchers relied on a mathematical model specifying anisotropic reaction-diffusion systems to generate the required Turing patterns. The resulting textured patterns were meticulously applied to the actuators, ensuring precise deformation that aligns with the intended movement. The synergy between the mathematical modeling and physical fabrication empowers the design of actuators that can respond dynamically to varying pneumatic inputs.
Fabrication Techniques: A Path to Scalability
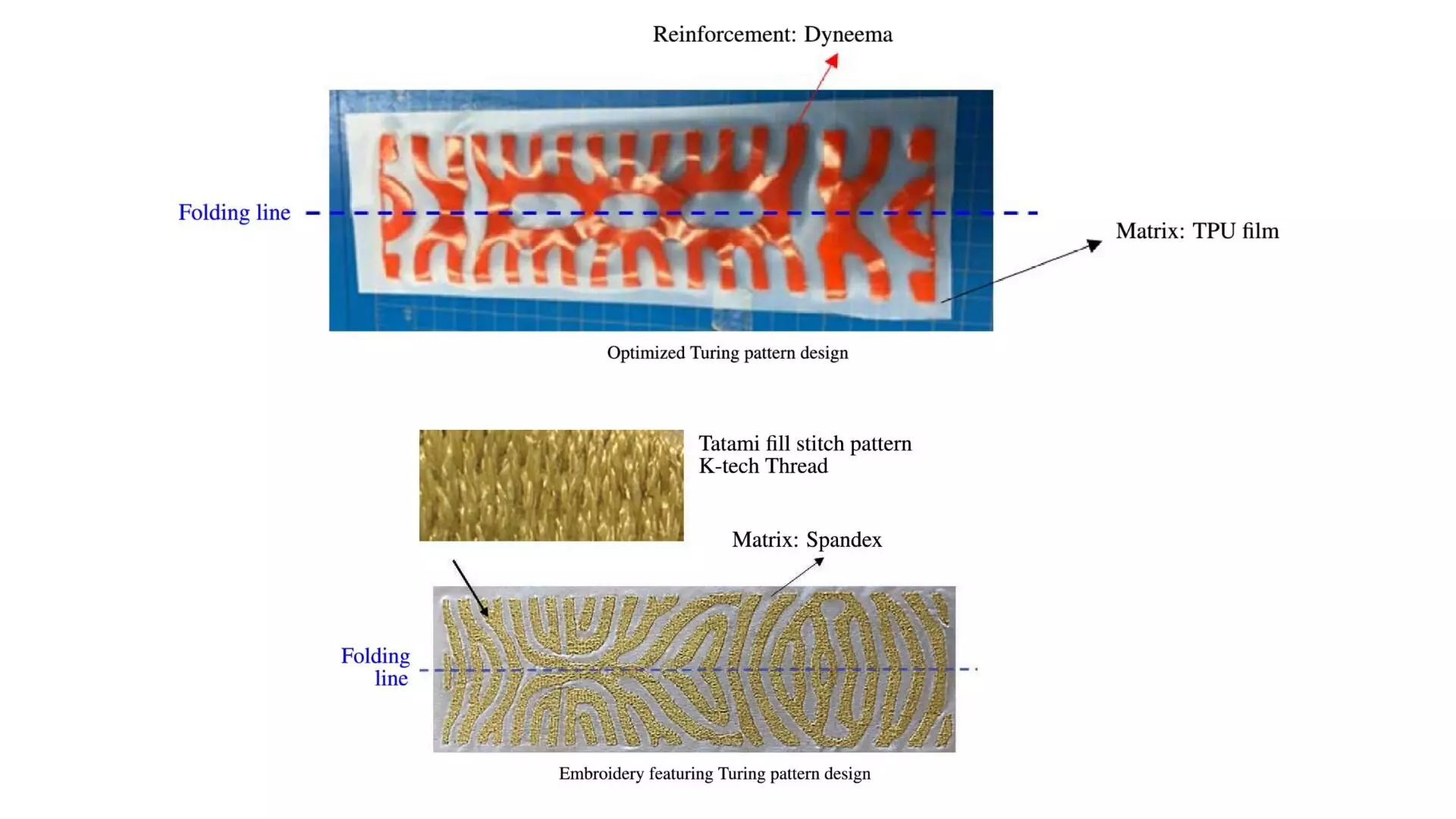
The study also explored two primary fabrication methods: heat bonding and embroidery. The heat bonding approach involves layering and adhering fabrics in specific patterns that allow varied stiffness within the actuator for enhanced movement control. This process is both scalable and cost-effective, benefiting from the simplification that Turing patterns offer in design.
Conversely, the embroidery method integrates these patterns directly into softer fabrics using stiffer threads, creating sections that facilitate distinct movements in response to pressure. Both fabrication approaches illustrate the versatility of Turing patterns, promoting greater adaptability in generating various concepts, from autonomous robotic arms to wearable exoskeletons.
The implications of this research extend far beyond the mere functionality of soft actuators. Future investigations are anticipated to examine the integration of Turing pattern designs with cutting-edge materials like shape memory alloys or electroactive polymers, potentially augmenting actuator dynamics. Moreover, there is a promising avenue for mass production by refining fabrication techniques, possibly employing 3D printing or advanced automated weaving systems.
The integration of Turing patterns into the realm of FSPAs signifies a transformative leap in soft robotics. By melding advanced design methodologies with innovative fabrication techniques, researchers are laying the groundwork for an era characterized by more efficient, adaptable, and safer soft robotic systems, ultimately poised to enhance human-robot interactions and broaden the applications of robotics in everyday life.