
The elephant’s trunk stands as one of nature’s most impressive feats of engineering, a true marvel of evolution that showcases both beauty and functionality. Able to perform a myriad of tasks from drinking and eating to social interaction and defense, the trunk is a complex assembly of a staggering 17 muscles—along with a host of nerve fibers—that allow for astounding dexterity and responsiveness. New research, however, is challenging our understanding of this majestic organ by demonstrating that much of its intricate movement can be mimicked using a remarkably simplified model with just three actuator “muscles.” This innovation not only highlights the elegance of biological structures but also serves as a springboard for advancements in robotics.
The Study: A Computational Leap
In a collaborative project between engineers at Stanford University and mathematicians from the University of Oxford, a team has developed a model that encapsulates the responsiveness and flexibility of an elephant’s trunk with minimal complexity. The research, published in the journal *Physical Review Letters*, offers insight into the physical principles governing not just the trunk but potentially other biological appendages, as well as robotic designs moving forward. Team member Alain Goriely emphasized the trunk’s role as a “paradigm for control of filamentary shape in a three-dimensional environment,” which speaks volumes about its potential applications in the field of robotics.
The study’s primary aim was to decode how an elephant’s trunk can manipulate objects with such precision. By constructing a mathematical model that imagines the trunk as a slender filament, the team was able to identify how longitudinal, radial, and helical movements could be recreated using just three actuators. This is a remarkable finding, considering that nature achieved this with a complex arrangement of 17 different muscles.
A Breakthrough in Motion Mechanics
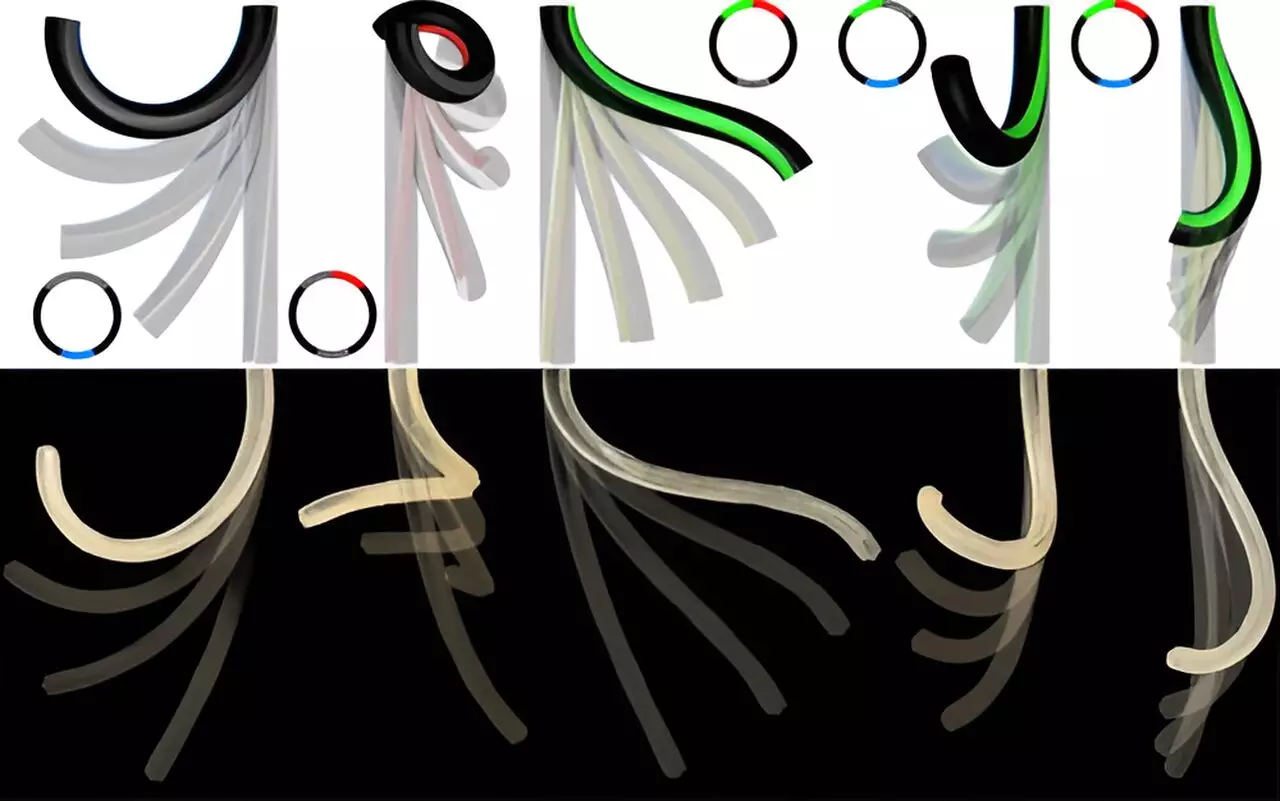
What makes this model particularly noteworthy is its capability to generate multiple modes of deformation using only one longitudinal actuator and two helical actuators. In essence, these two types of actuators simulate the actual twisting and bending movements found in the trunk of an elephant. Just by arranging these actuators correctly, the model can exhibit a wide range of motion, akin to the organic movements of an elephant. This can be visualized as creating a “reachability cloud,” a three-dimensional space in which this simulated trunk can interact with its environment—reaching not just in simple, linear directions but also curling and twisting, enabling it to navigate around obstacles.
Through innovative 3D printing techniques, the team constructed flexible polymer-based tubes equipped with liquid-crystalline elastomer fibers that contract upon heating. This allowed for real-time control of the model, significantly enhancing its ability to mimic the agile movements of an elephant trunk. As Goriely noted, once they calibrated the model properly, they could recreate all the primary modes of motion, demonstrating that the engineered model was not just an abstract concept but a tangible reflection of nature’s design.
Implications for Robotics and Engineering
The implications of this research extend far beyond mere academic curiosity. In a world increasingly reliant on automation and robotics, developing a minimalistic design that retains high functionality introduces exciting possibilities. The “reachability cloud” created by their model demonstrated that it could extend further in various directions compared to traditional robotic arms that often rely on more complicated structures. This achievement can reshape industries where robotic arms and tools are integral, such as manufacturing lines or service robotics.
Moreover, the unique approach to modeling based on biological principles can allow engineers to create robotic arms that not only mimic movements seen in elephants but also capitalize on their efficient designs. This efficiency could lead to robots that are lighter, more adaptable, and capable of handling intricate tasks typically reserved for human dexterity, such as packing delicate items or performing precise surgical operations.
A Step Towards Nature-Inspired Engineering
Despite the promise shown by this minimal trunk design, it is essential to acknowledge its limitations. As it stands, the model cannot elongate or shorten, which poses restrictions on its adaptability in varied applications. Additionally, further research is needed to understand how well this design can manage different loads. Yet, the journey of developing this model illustrates a growing trend in engineering: an increasing focus on biomimicry as an approach to solve complex mechanical problems.
The study of the elephant trunk has transcended its zoological allure to inspire groundbreaking advancements in robotics. It beautifully encapsulates the idea that by learning from nature, we can unlock innovative solutions that propel technology into uncharted territories of efficiency and capability.